Autonomous Robot
May 2017 - Aug 2017
Overview
A multi-award winning autonomous robot designed to play in GVSU’s robot socky competition. It won 1st place in the robot socky competition and later went on to receive the 1st Place Prize in the IEEE International Student Robotics Competition in Portland, OR.
-
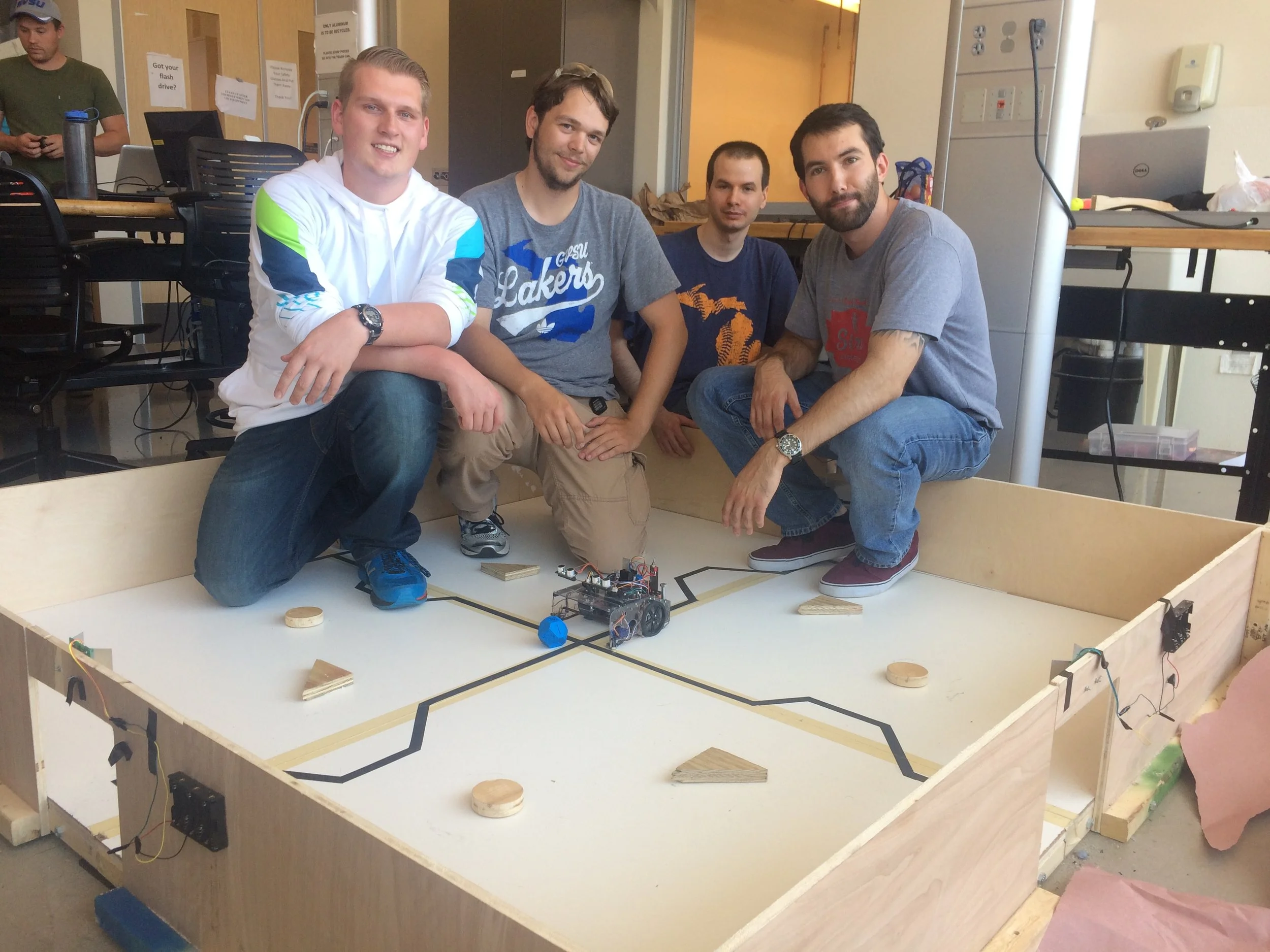
The objective of this project was to design and build an autonomous robot to compete in games of robot sockey against three other robots created by other teams.
Robot sockey takes place in a 6’ x 6’ arena with walls approximately one foot tall. Each of the four walls has a one foot wide goal in the center. Inside of the arena, eight wooden obstacles are fixed to the playing surface to make navigating the course more difficult. These obstacles are approximately 1” tall, 4” wide, and 4” in length. The arena has black lines across its floor that form paths to each goal. Each goal also has an infrared beacon above it, which can be detected by infrared receivers.
Before each match, the arena is filled with 24 different balls of different types, including ping-pong balls, golf balls, and bouncy balls. Four robots compete in a single match and the objective is to score the most goals within a three minute time limit. When a ball leaves the arena through a goal, the robot that touched it last receives credit for the goal. If a robot drives out of the arena, it cannot be placed back into the arena.
-
Team Captain:
Coordinated schedules and meet-ups
Tracked budget
Verified robot was within regulations
Mechanical:
Overall design
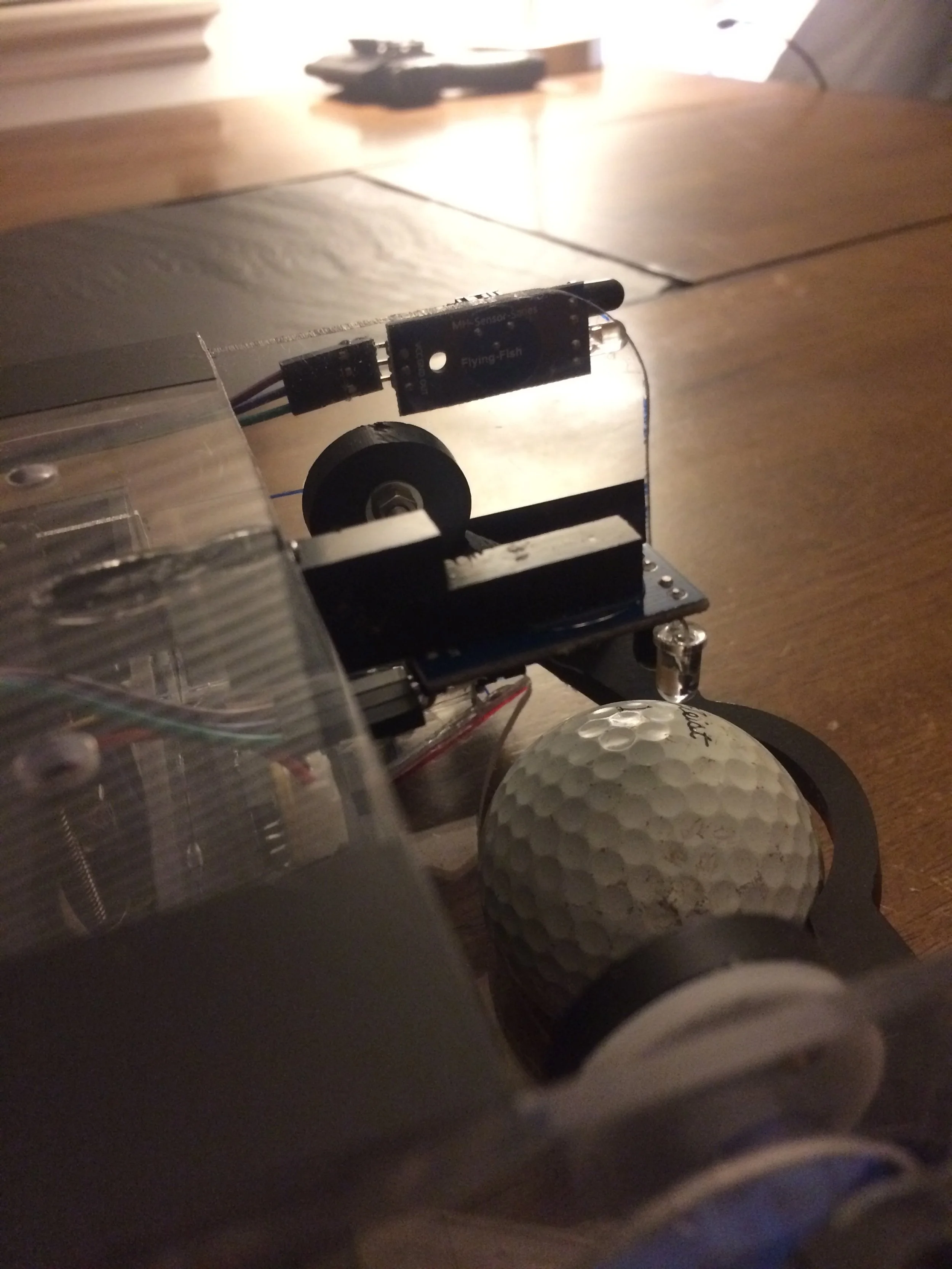
Sensor placement and functionality
Motor and servo placements
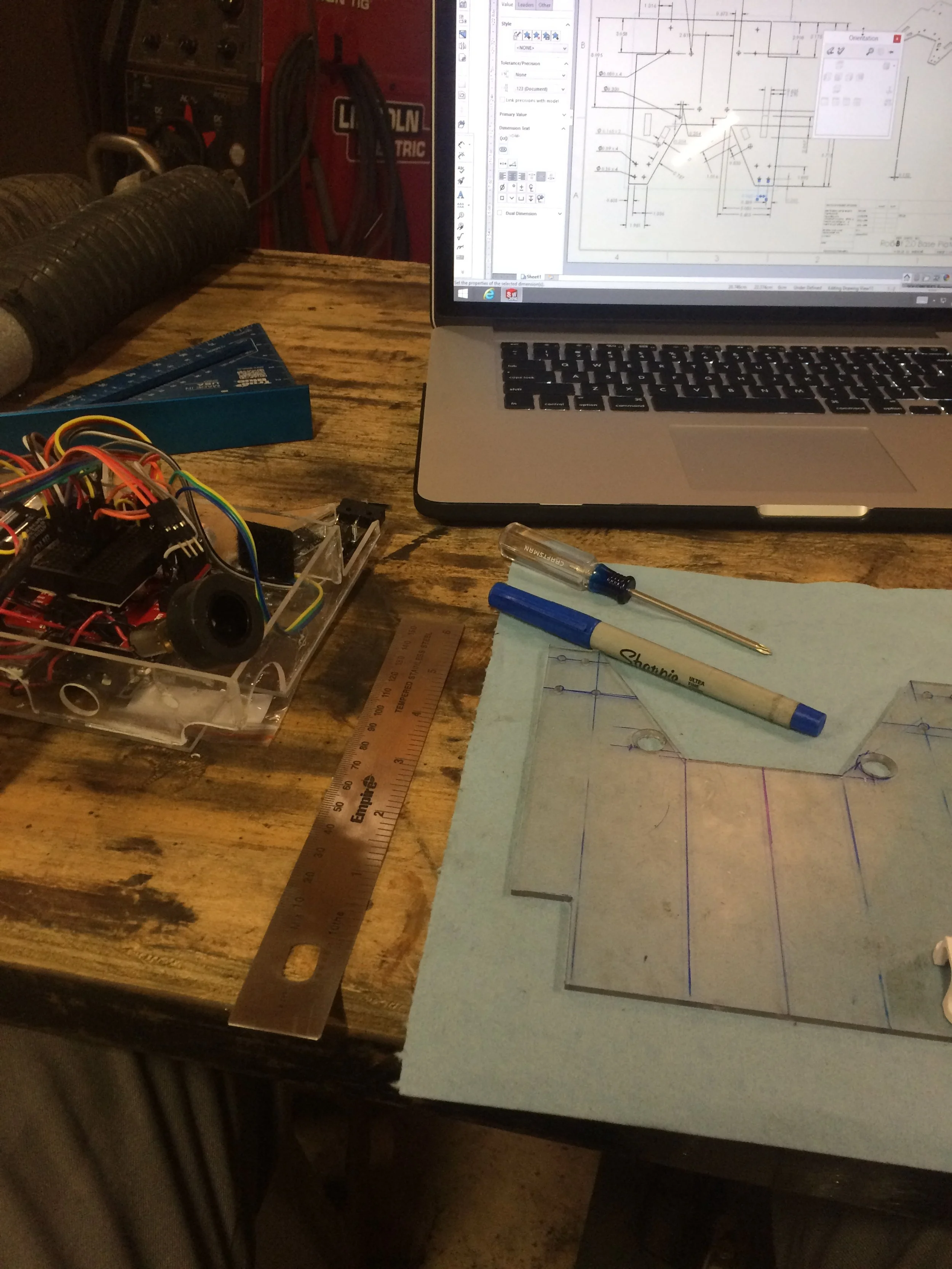
Robot Construction
Software:
Worked with a teammate to design the state machine logic for autonomous behavior
Translated sensor capabilities for software integration
Electrical:
Routed sensor and motor wiring
-
Lessons:
The probability of a successful design greatly increases when it undergoes extensive testing.
Outcome:
The team was able to adapt our design when major deficiencies were observed and remanned focused on designing a robust robot that balanced sensor selection and software logic.
↓↓ Photos ↓↓
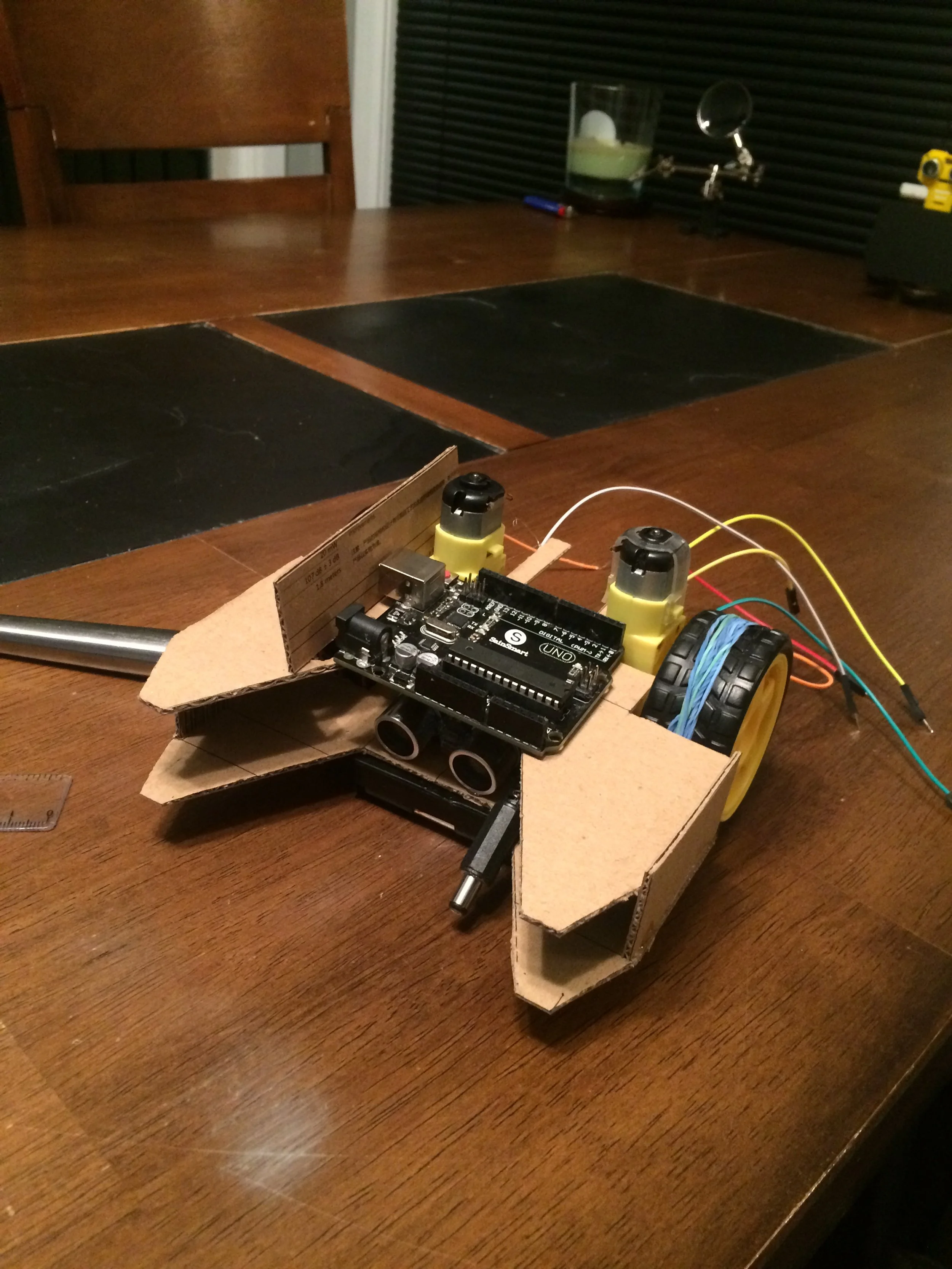
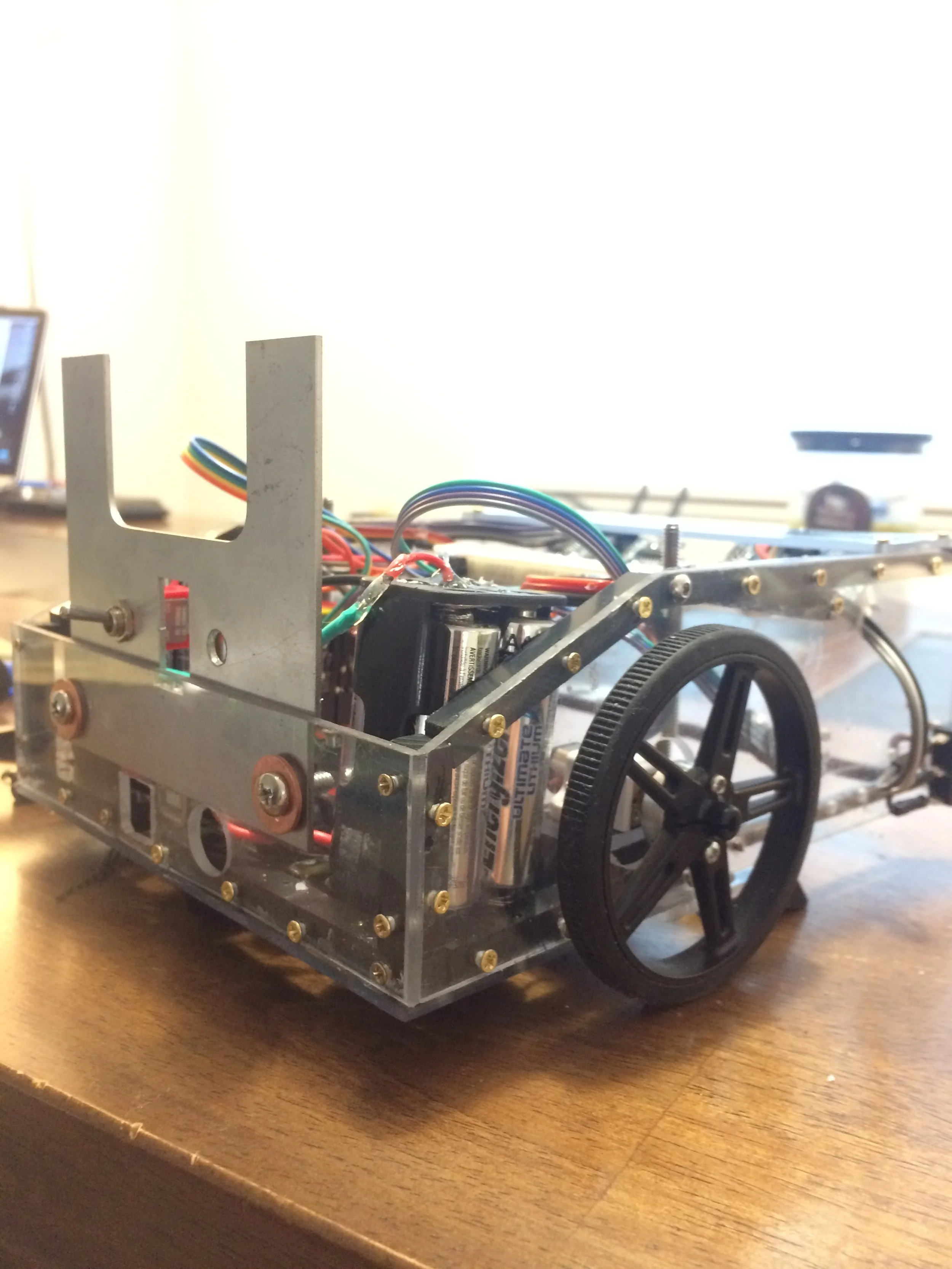
Pre Midterm Design
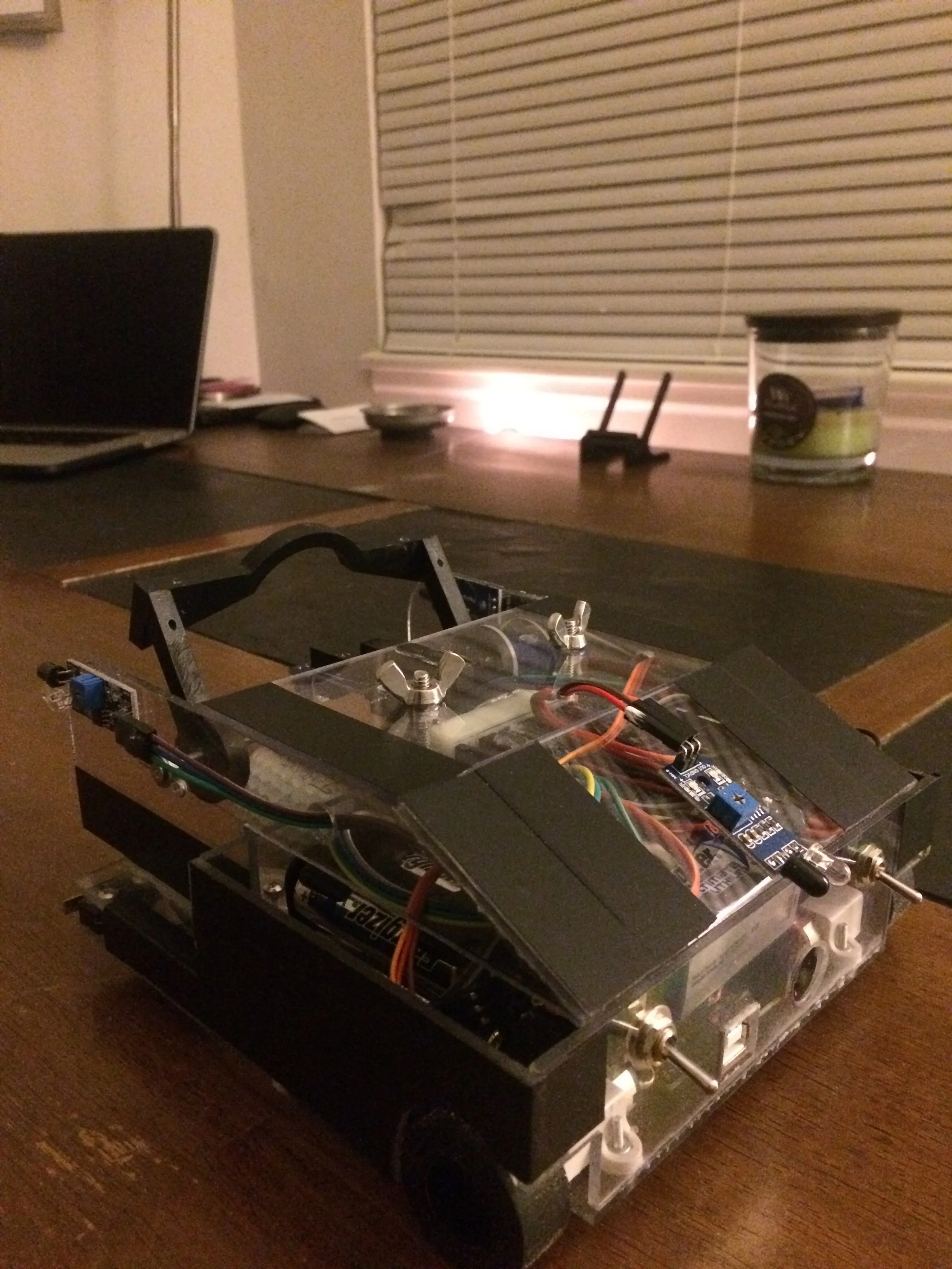
During the midterm preliminary competition it became obvious that the robot needed a redesign. The software was adequate, but we needed a chassis that could collect more balls and had more space for line following sensors.






Software Design
Testing and sensor data played a huge role in the design of the software logic. In general, the robot would spend a set amount of time searching for balls, find and follow a line to the goal and score the balls it had captured. It repeated this process 3 times per game.


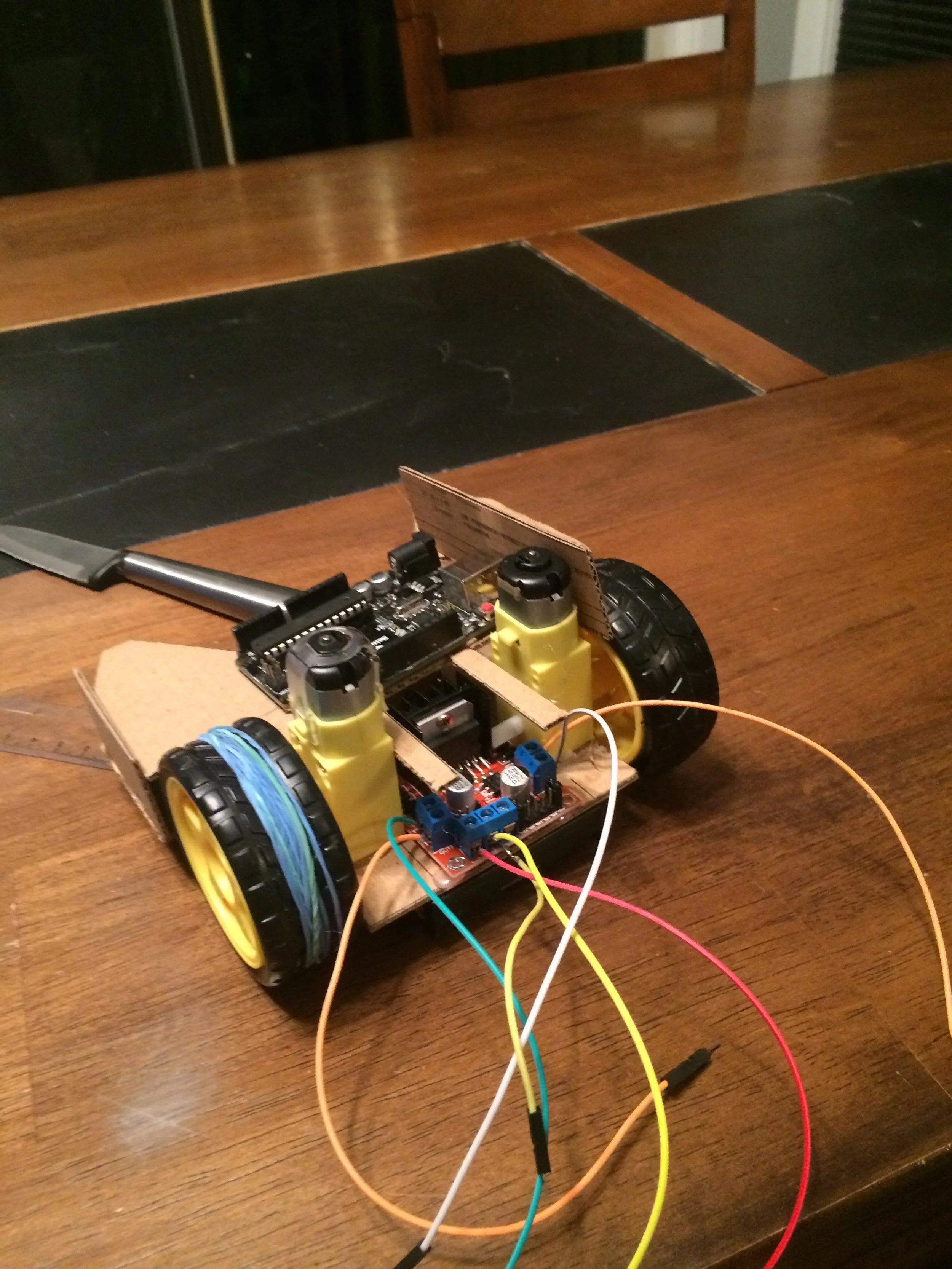
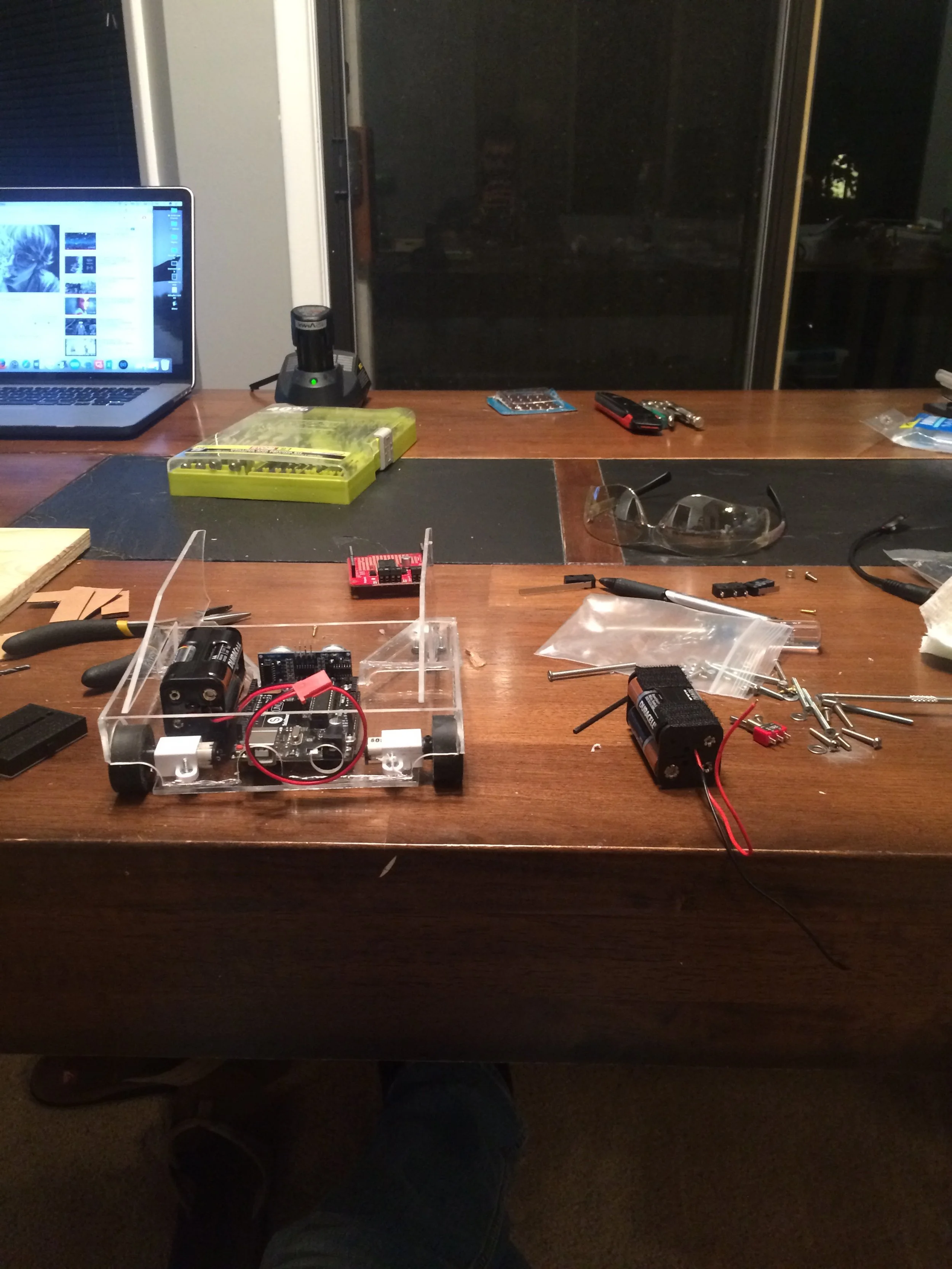
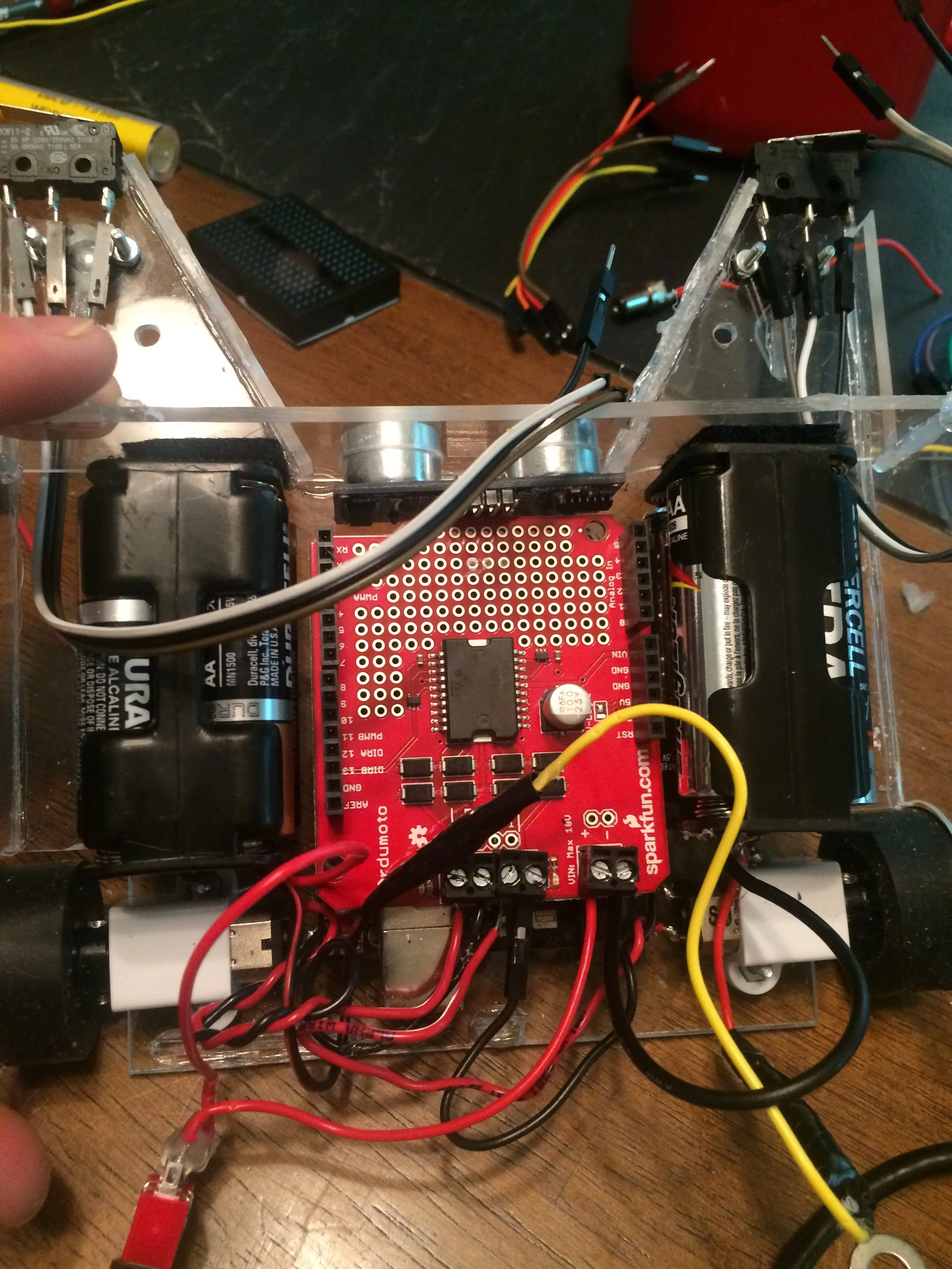
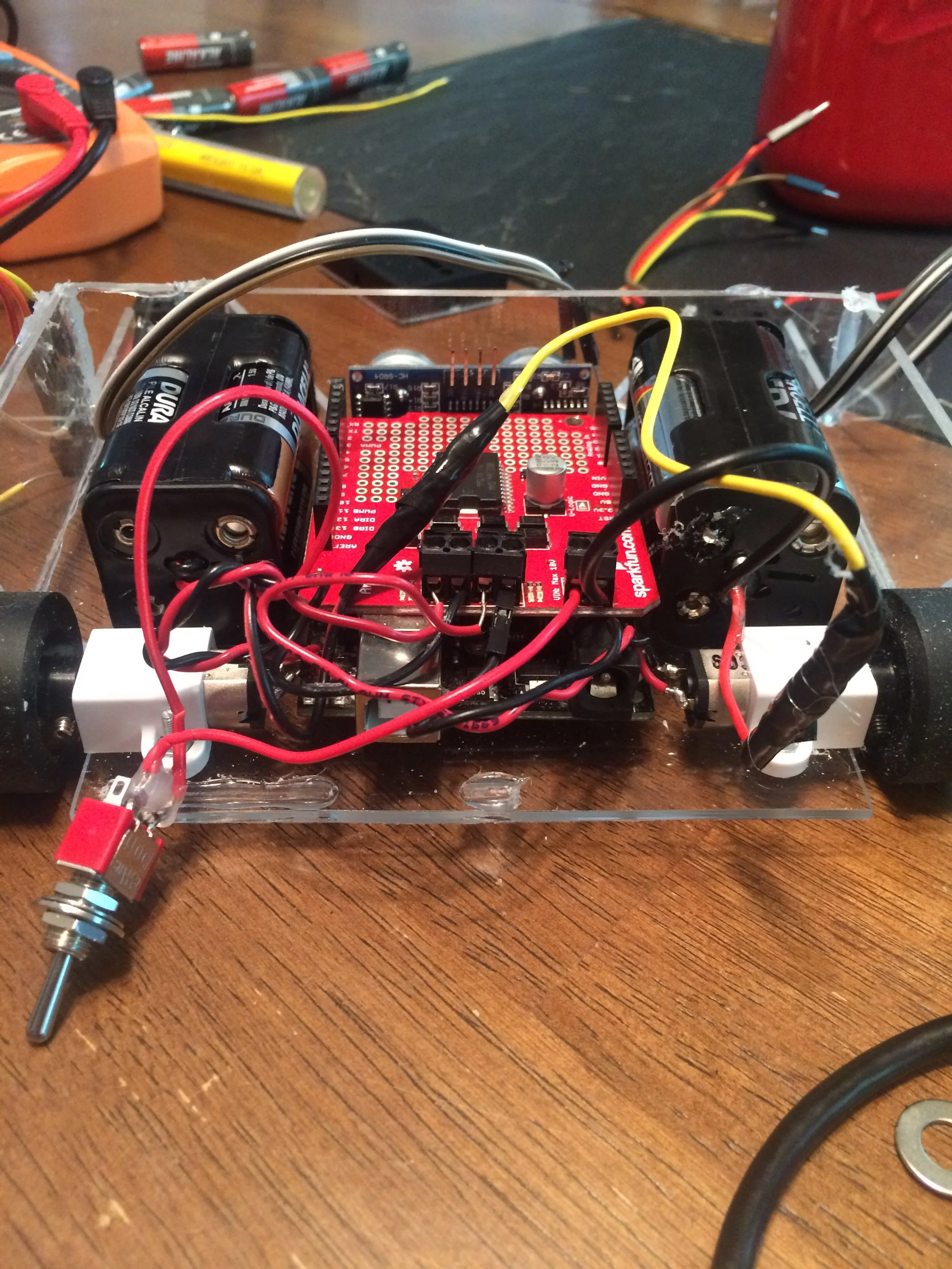
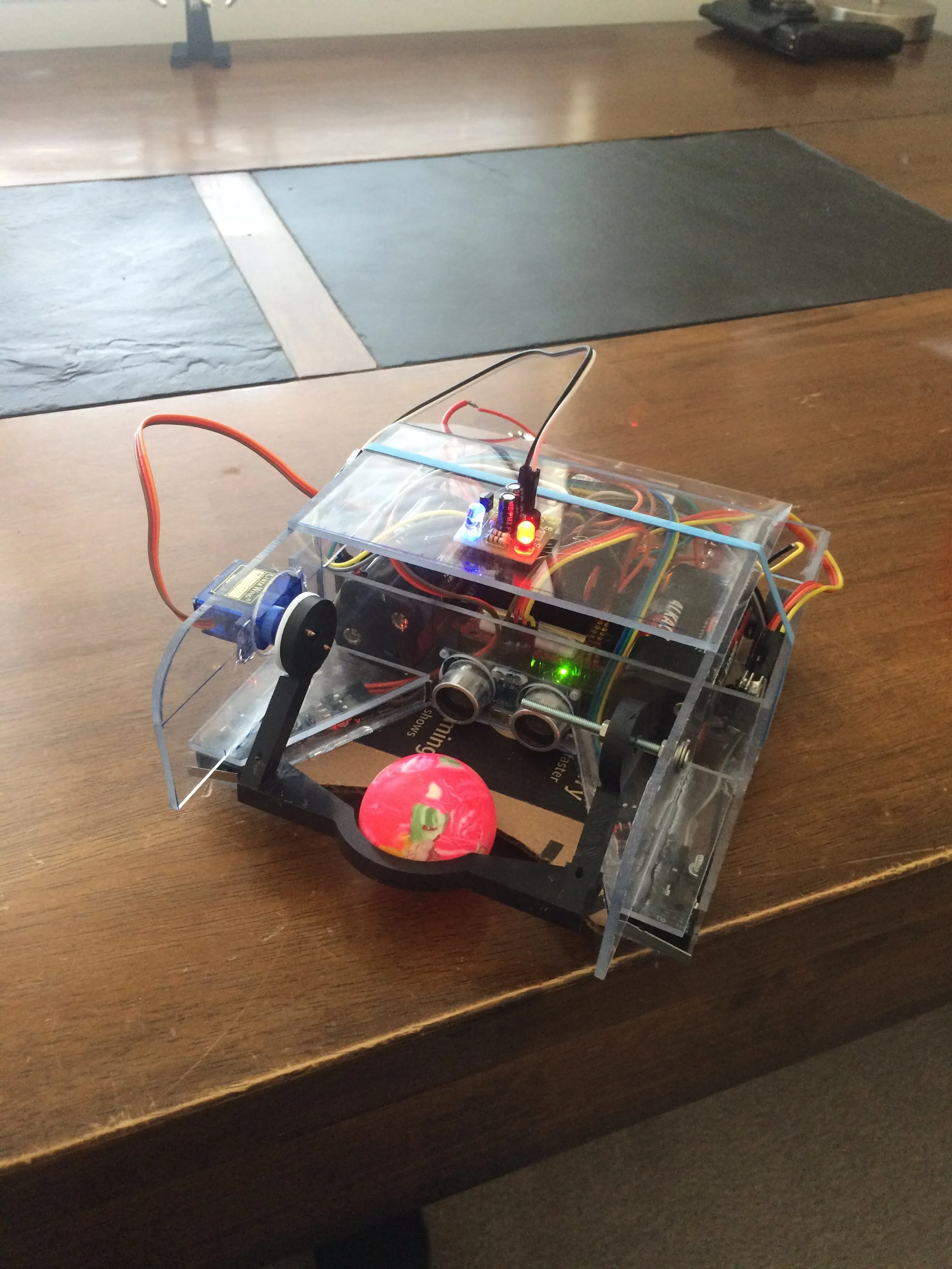
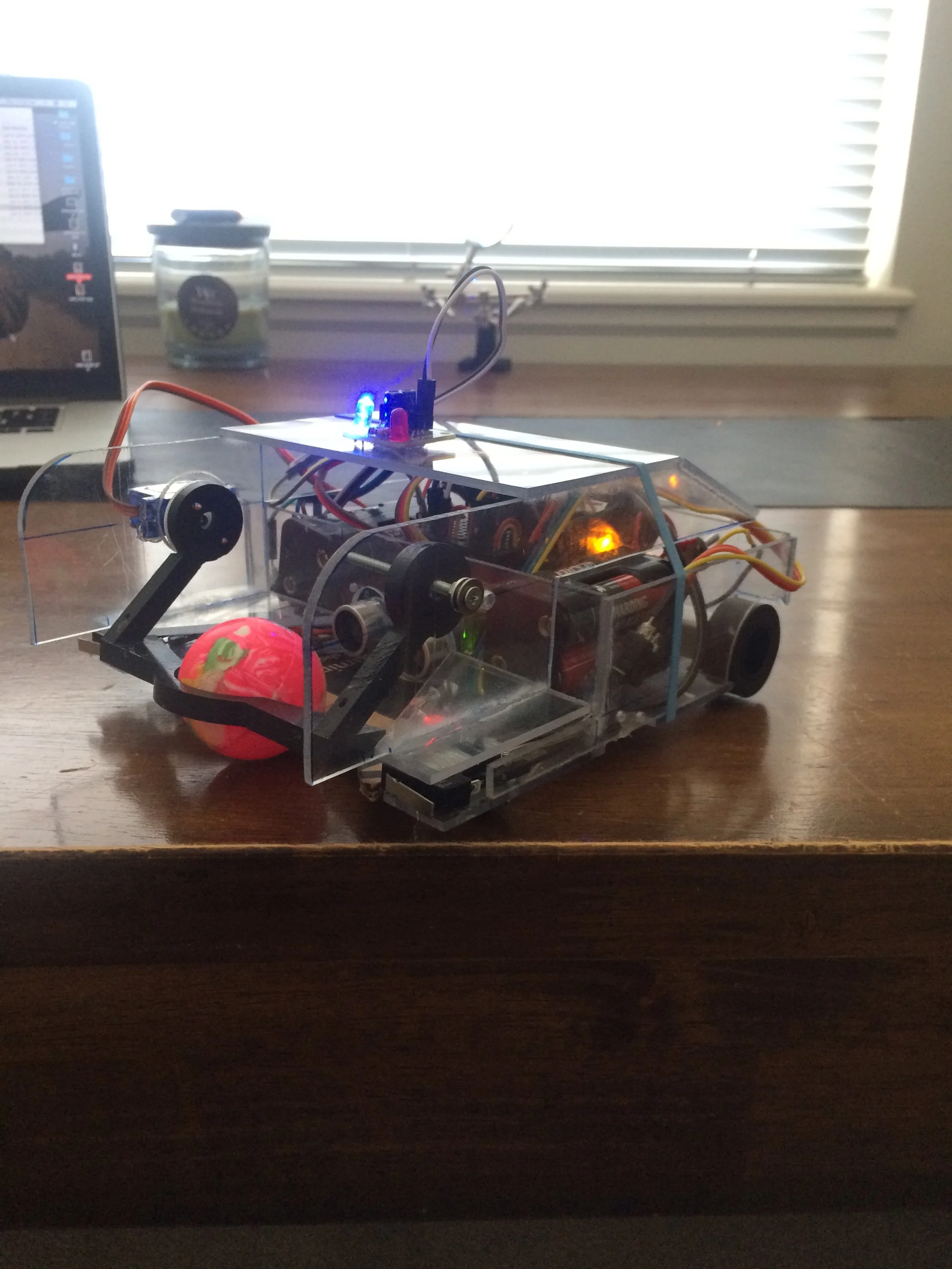
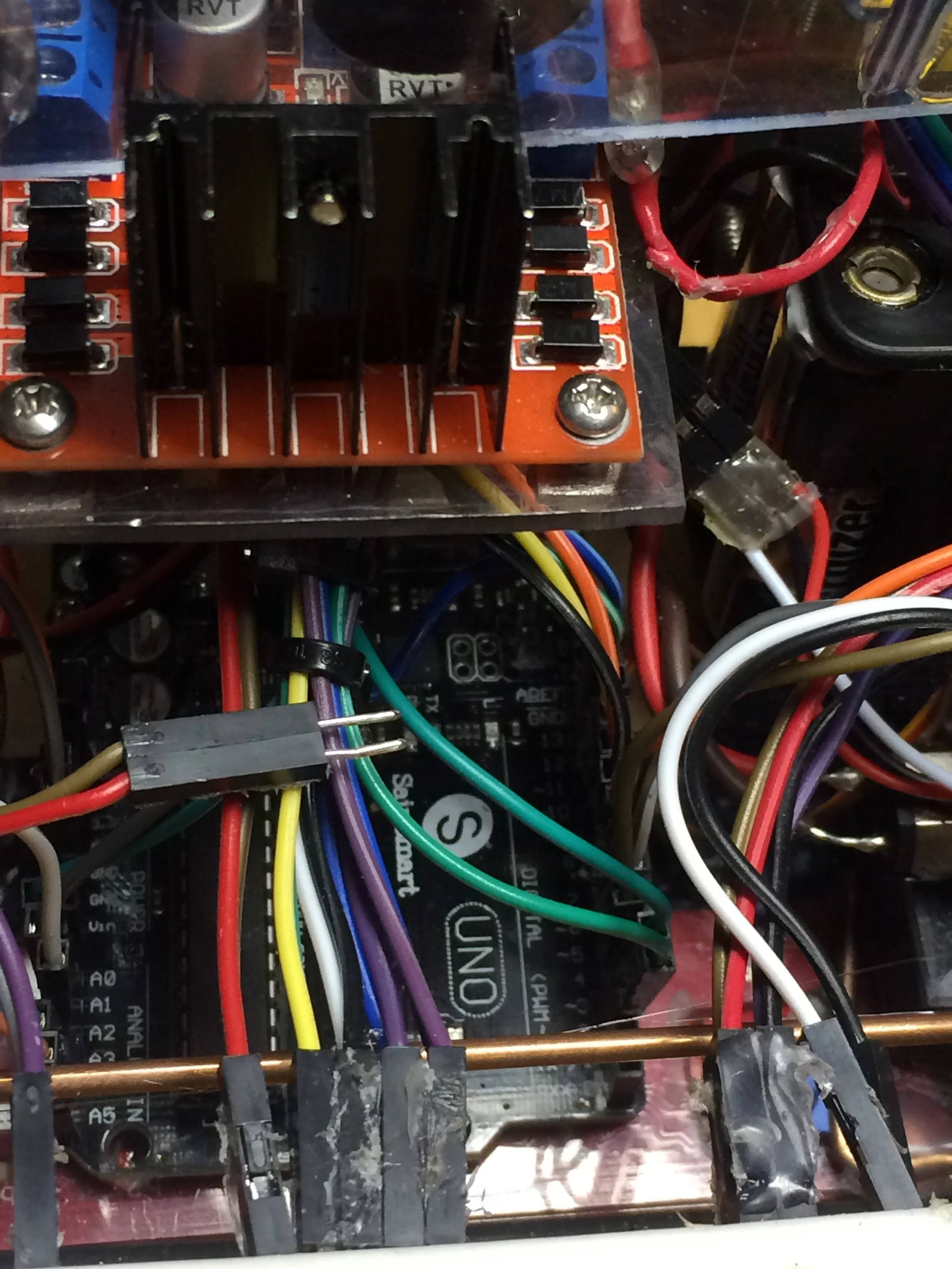
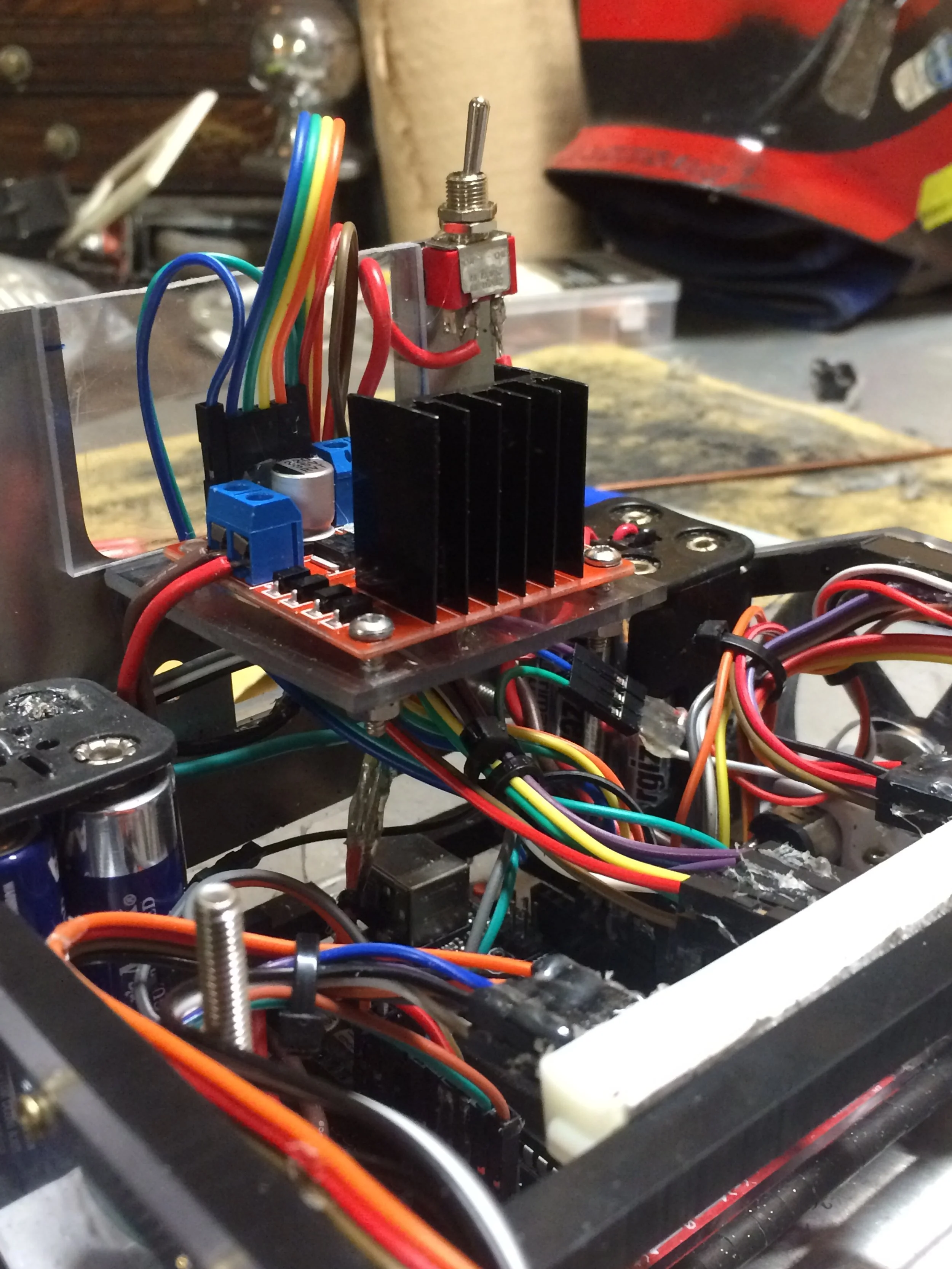
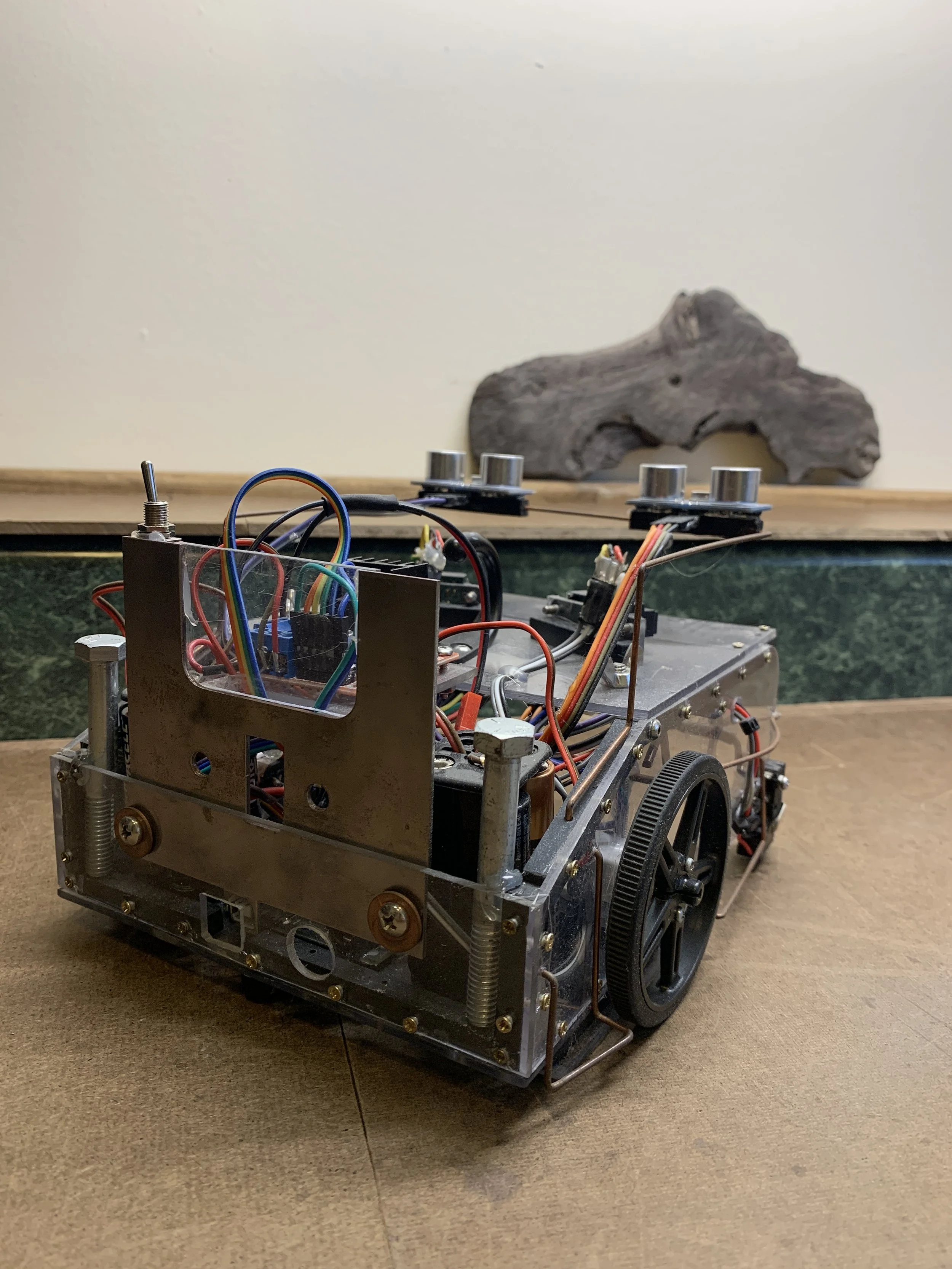
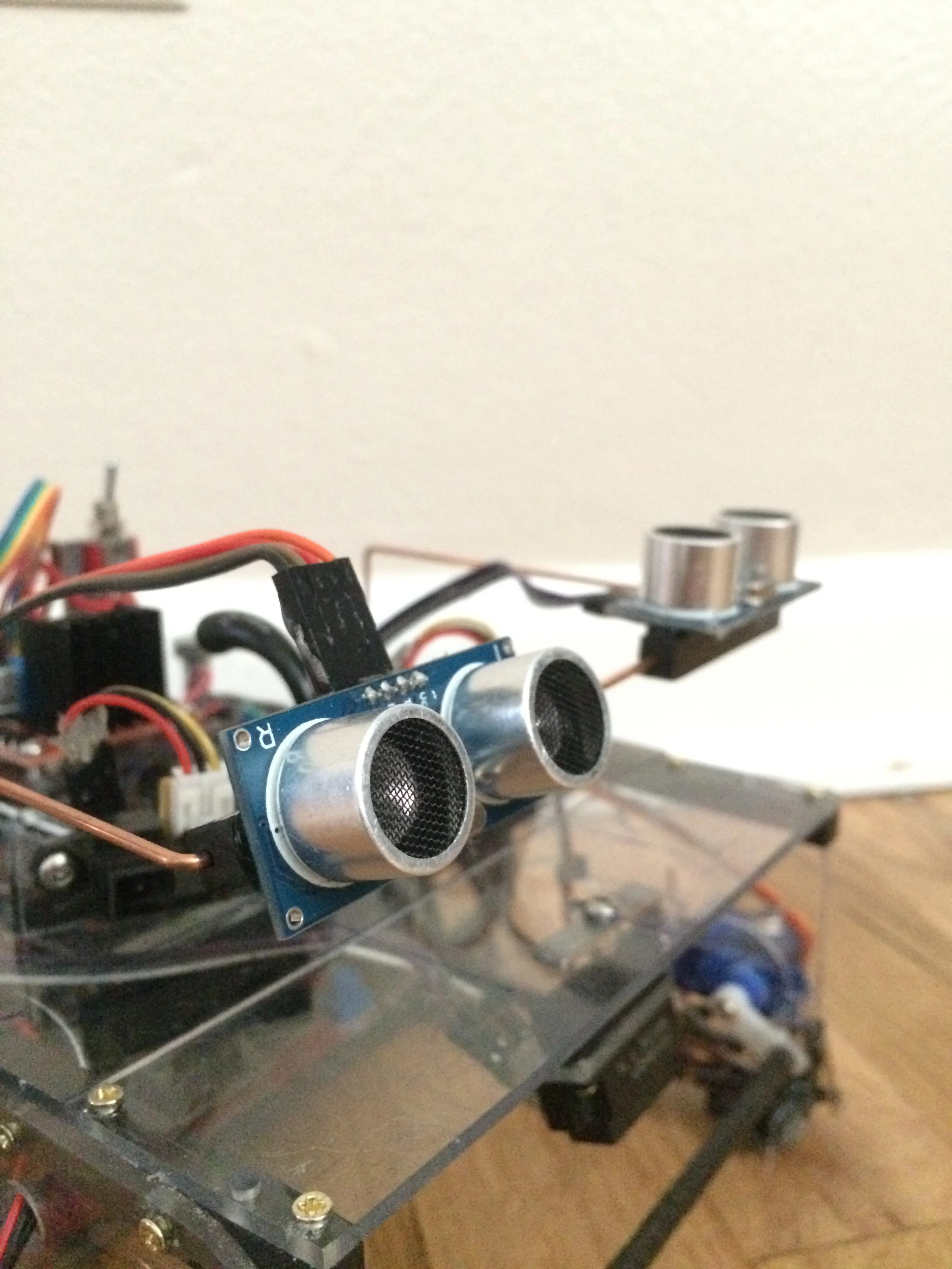
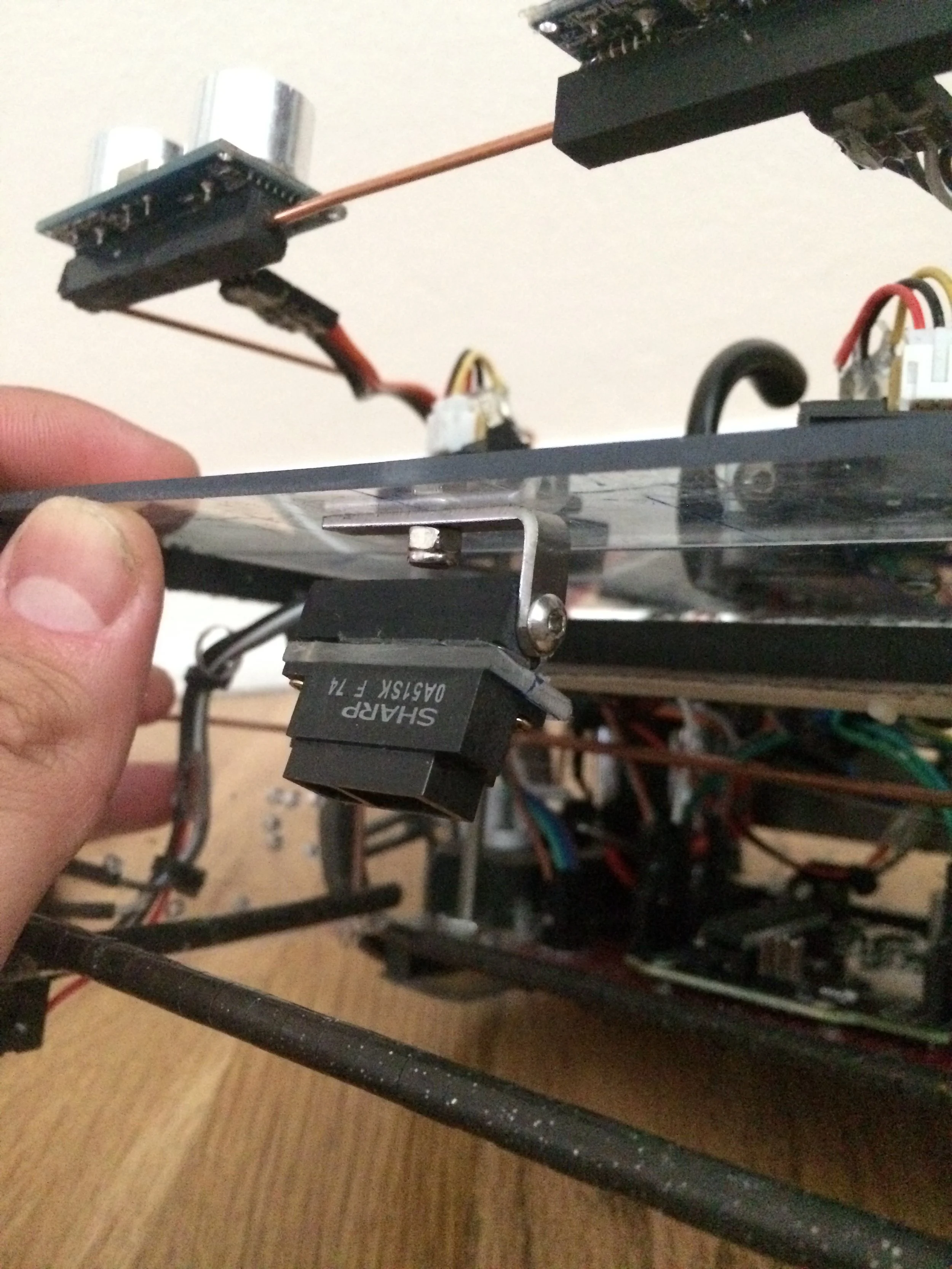
Electrical Design
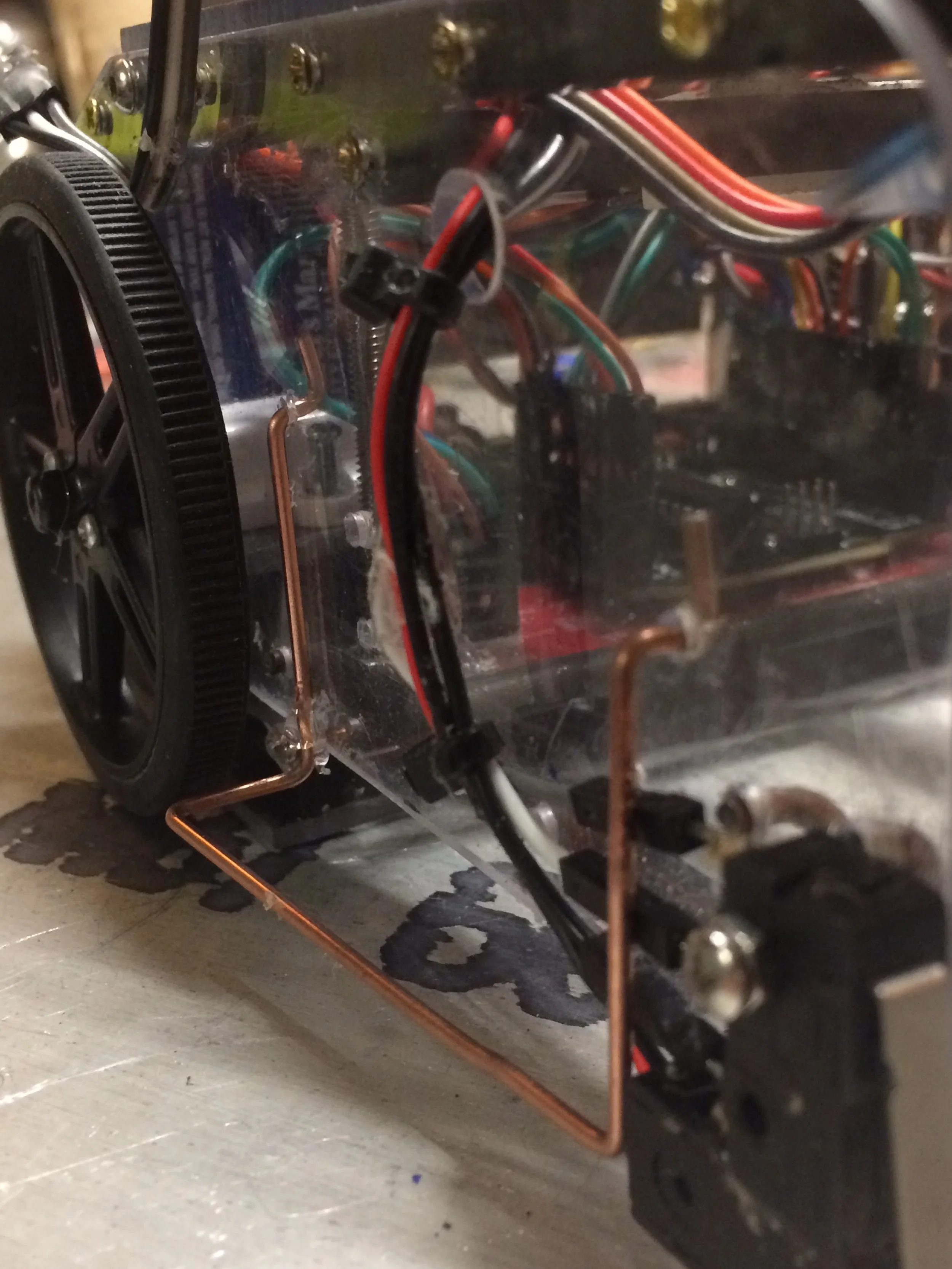
Between the sensors, servo, and DC motors, nearly every available pin on the Arduino Uno was used. In addition, 8AA batteries were needed to power the Arduino and an H-Bridge which was used to drive the 2 DC motors. Due to the nature of the game, it was vital to protect the sensors and wiring from damaged caused by collisions with other robots and obstacles.


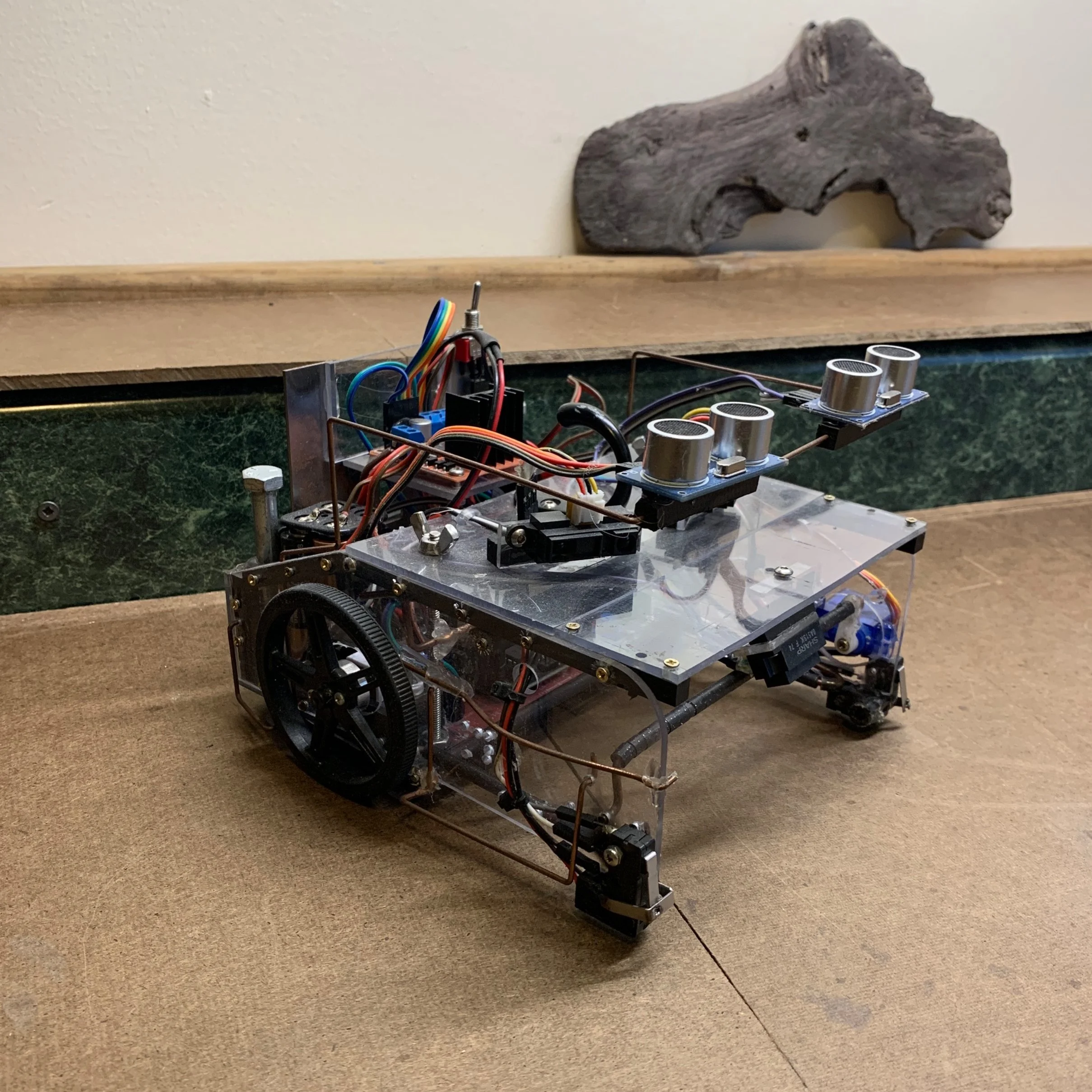
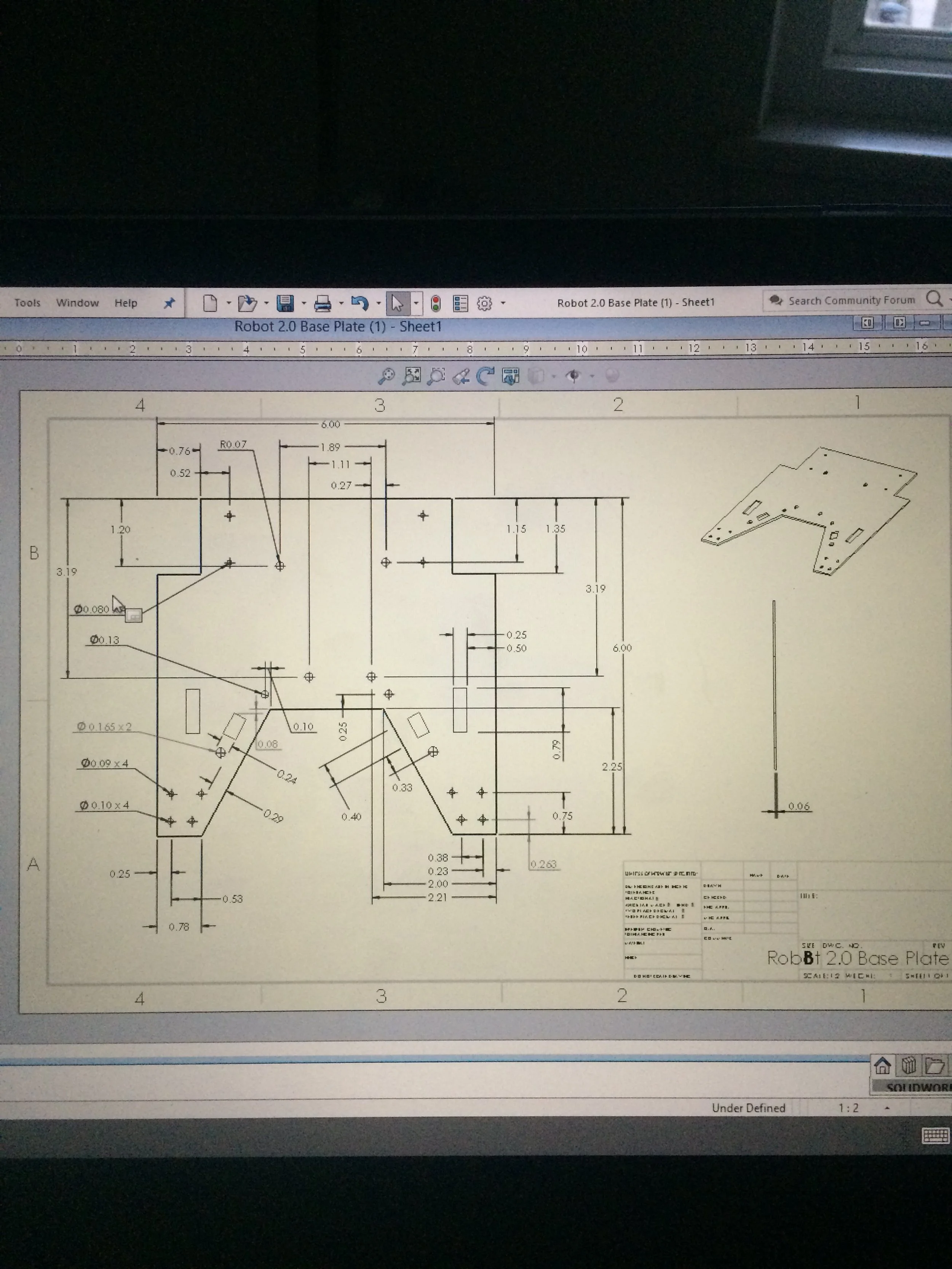
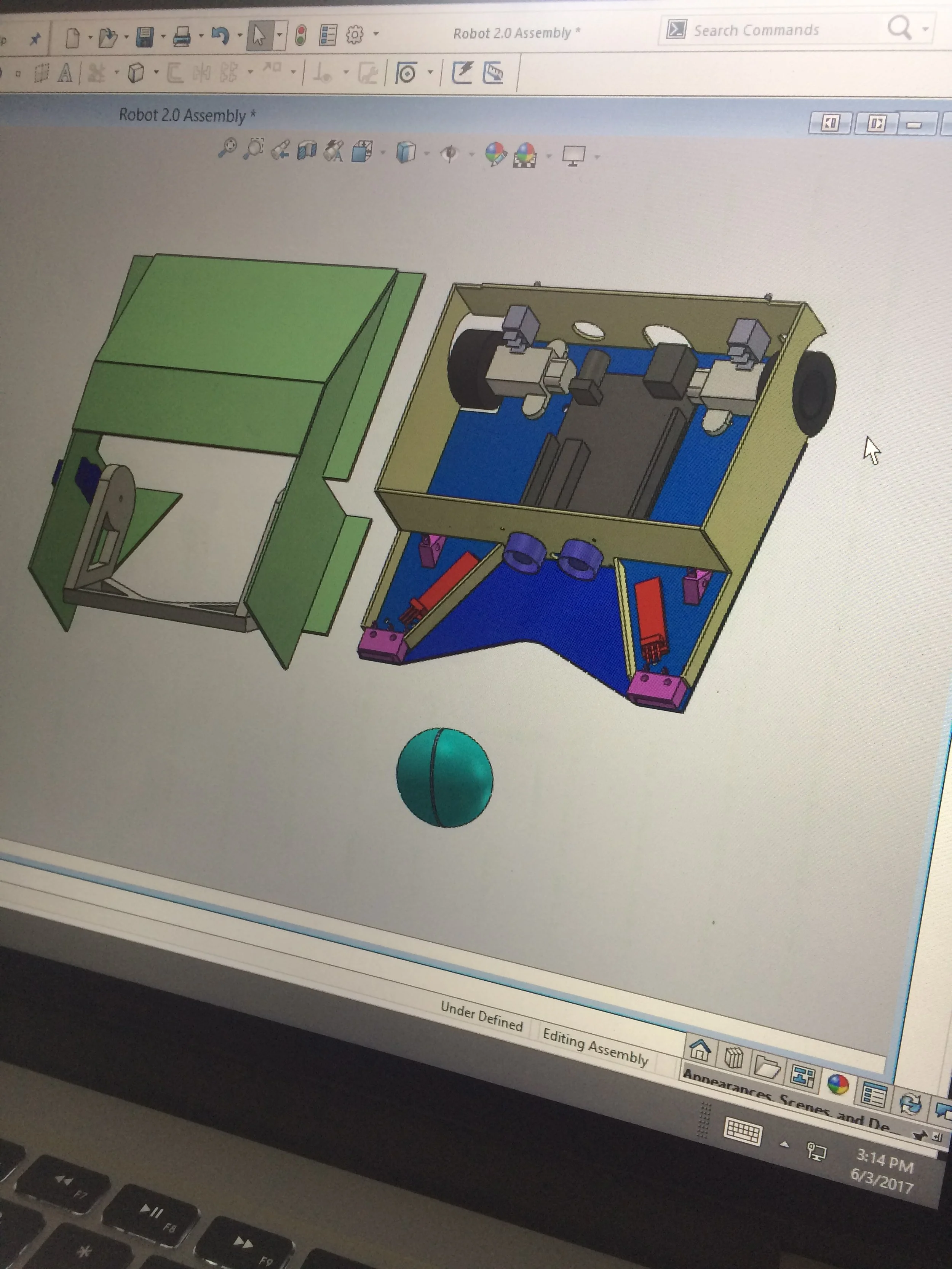
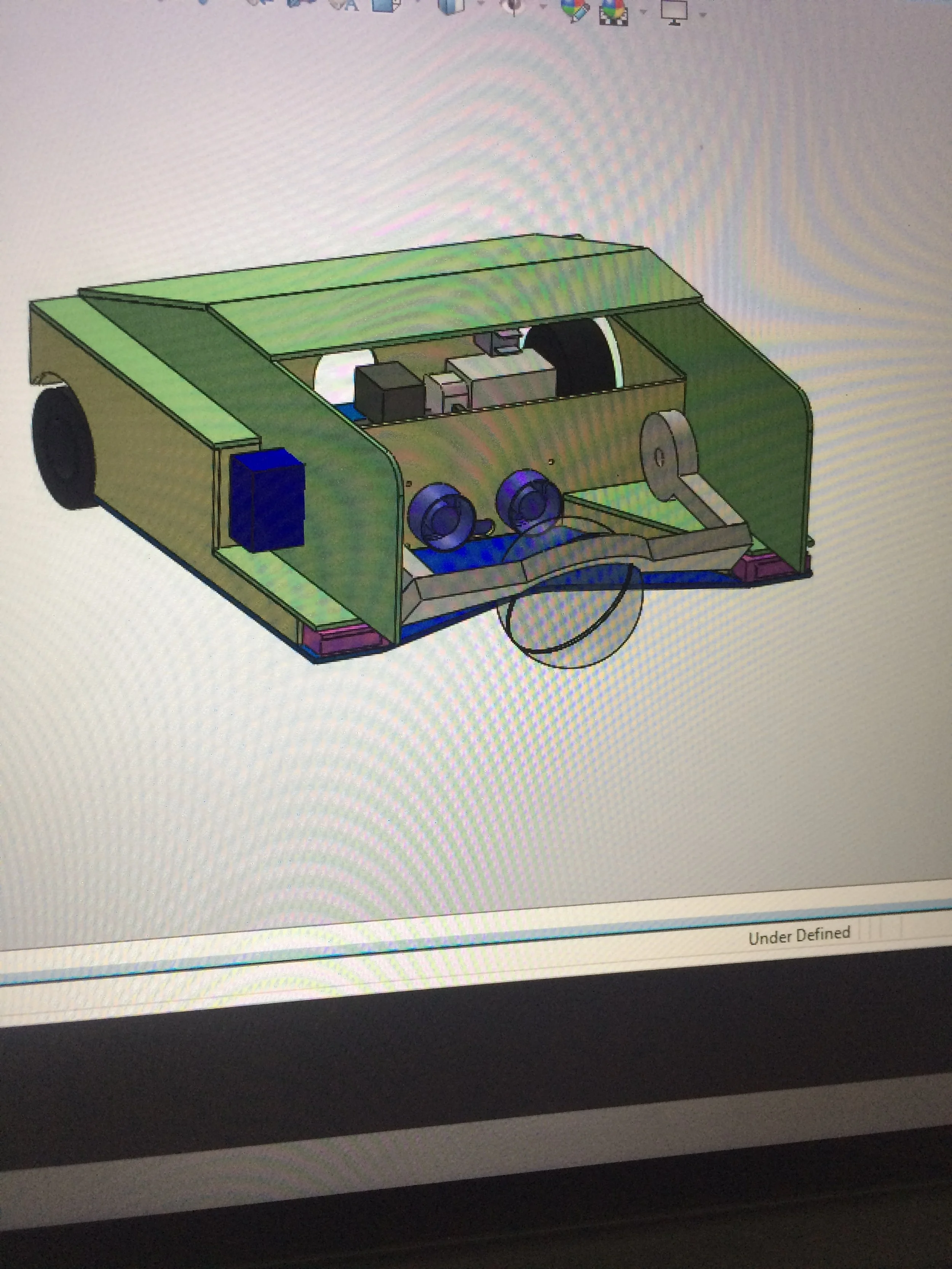
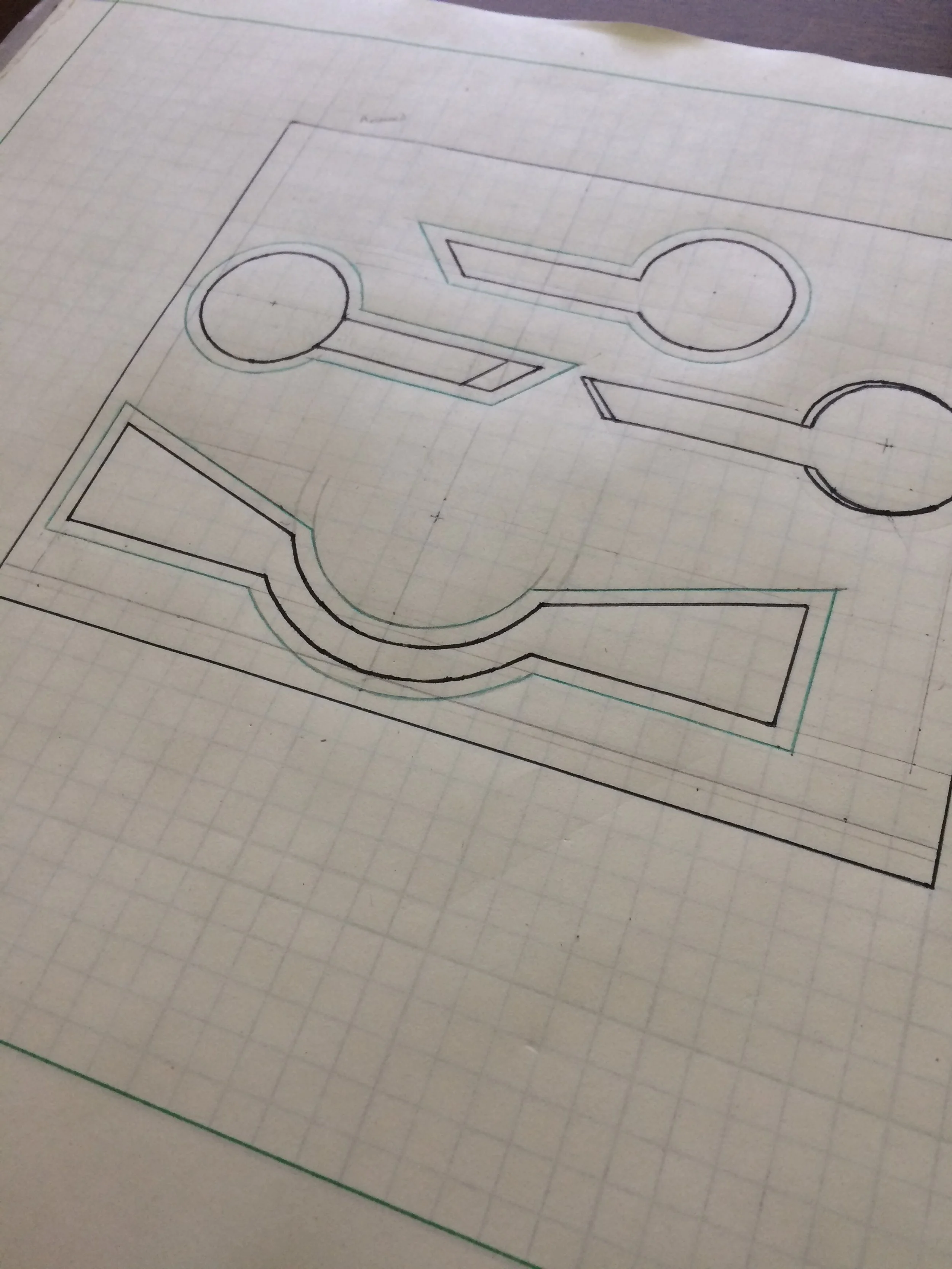
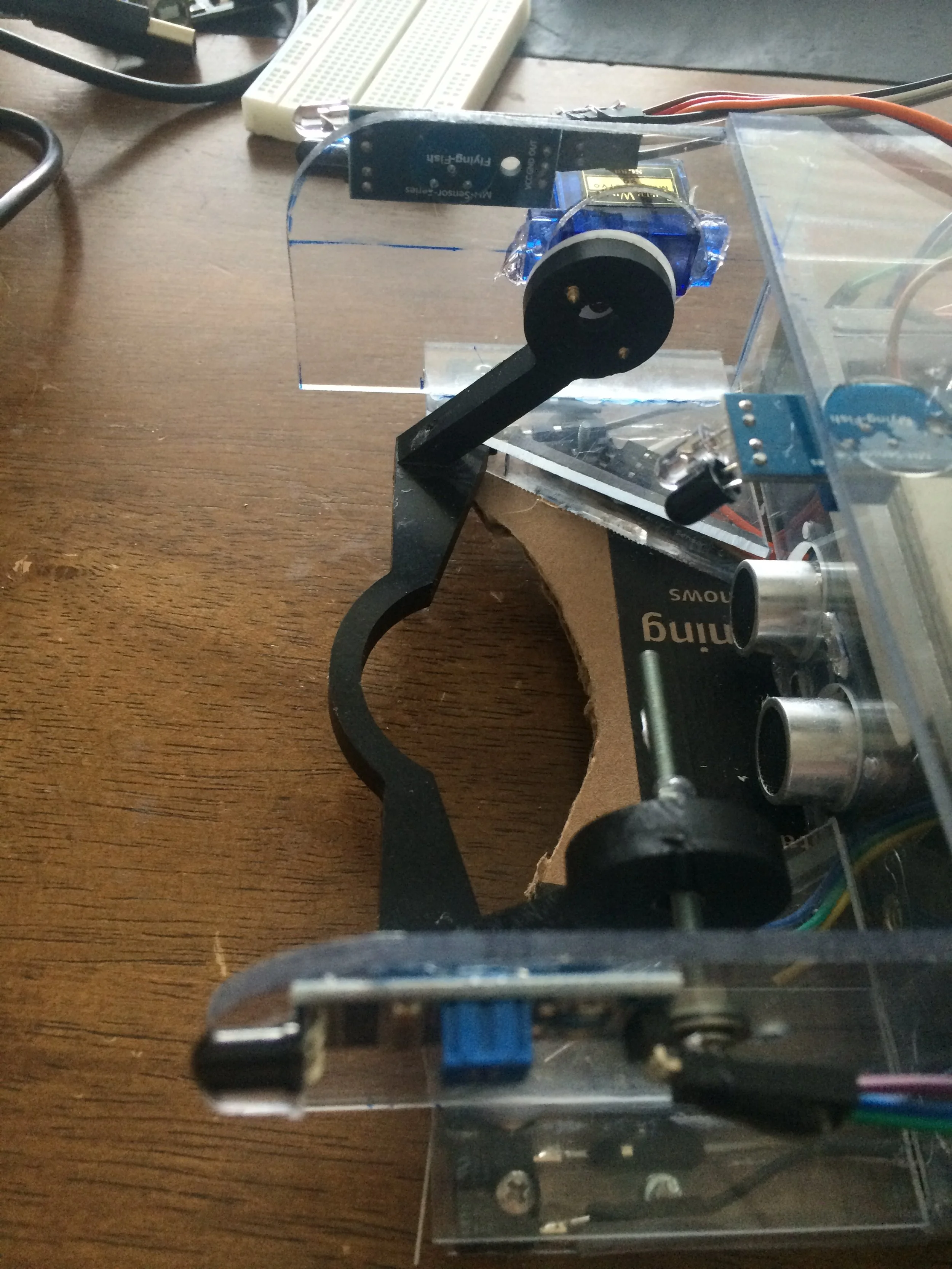
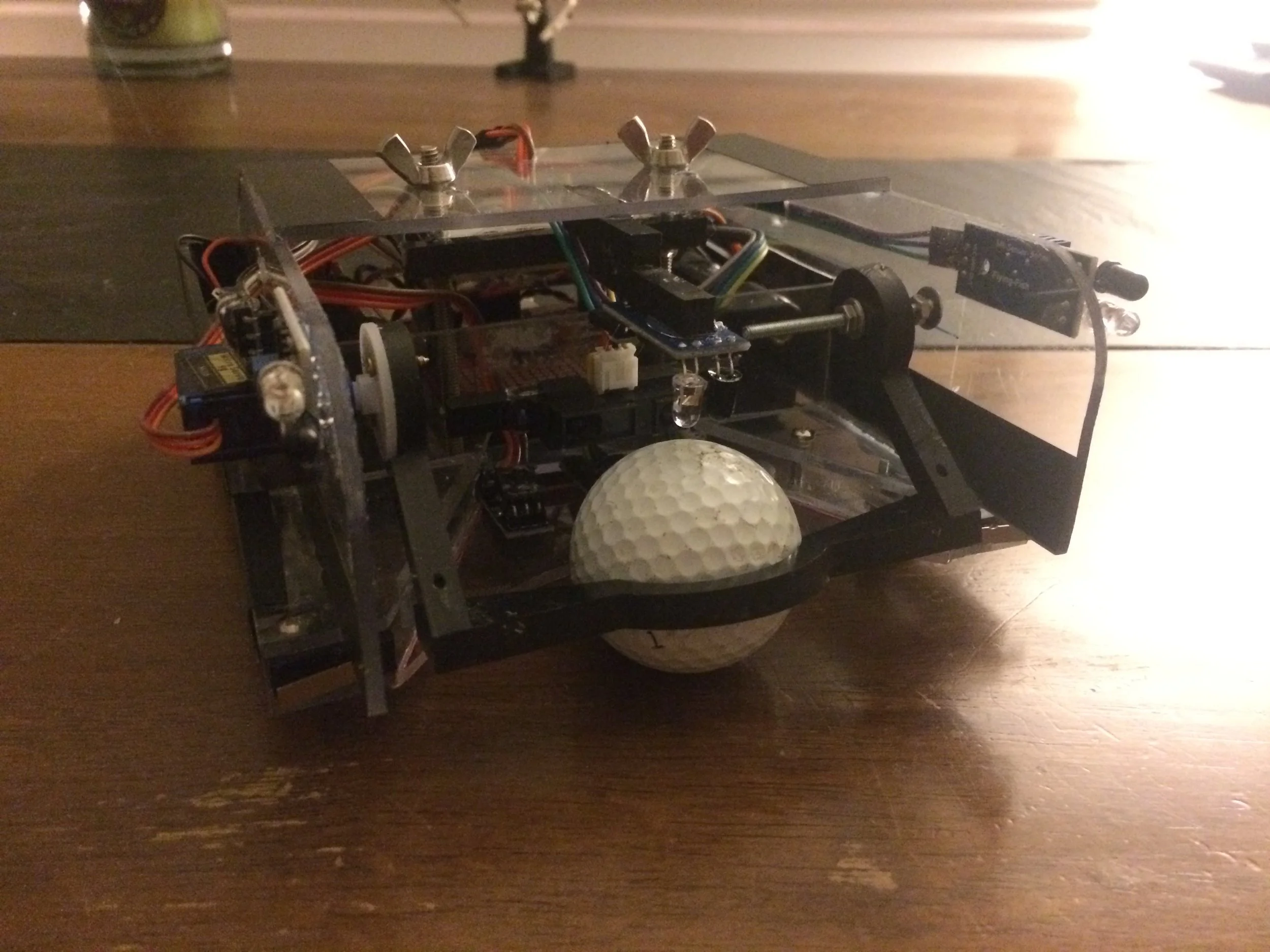
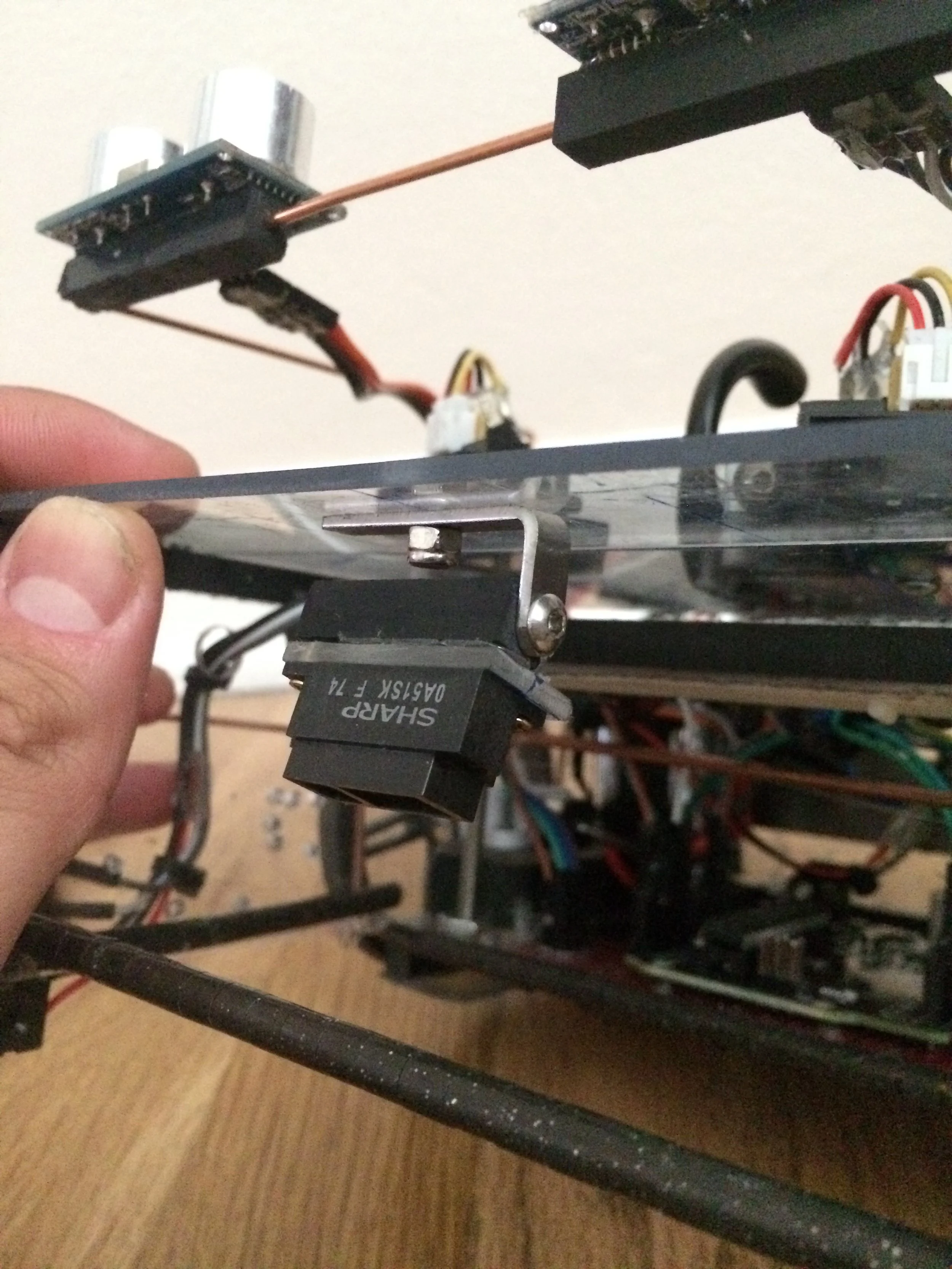
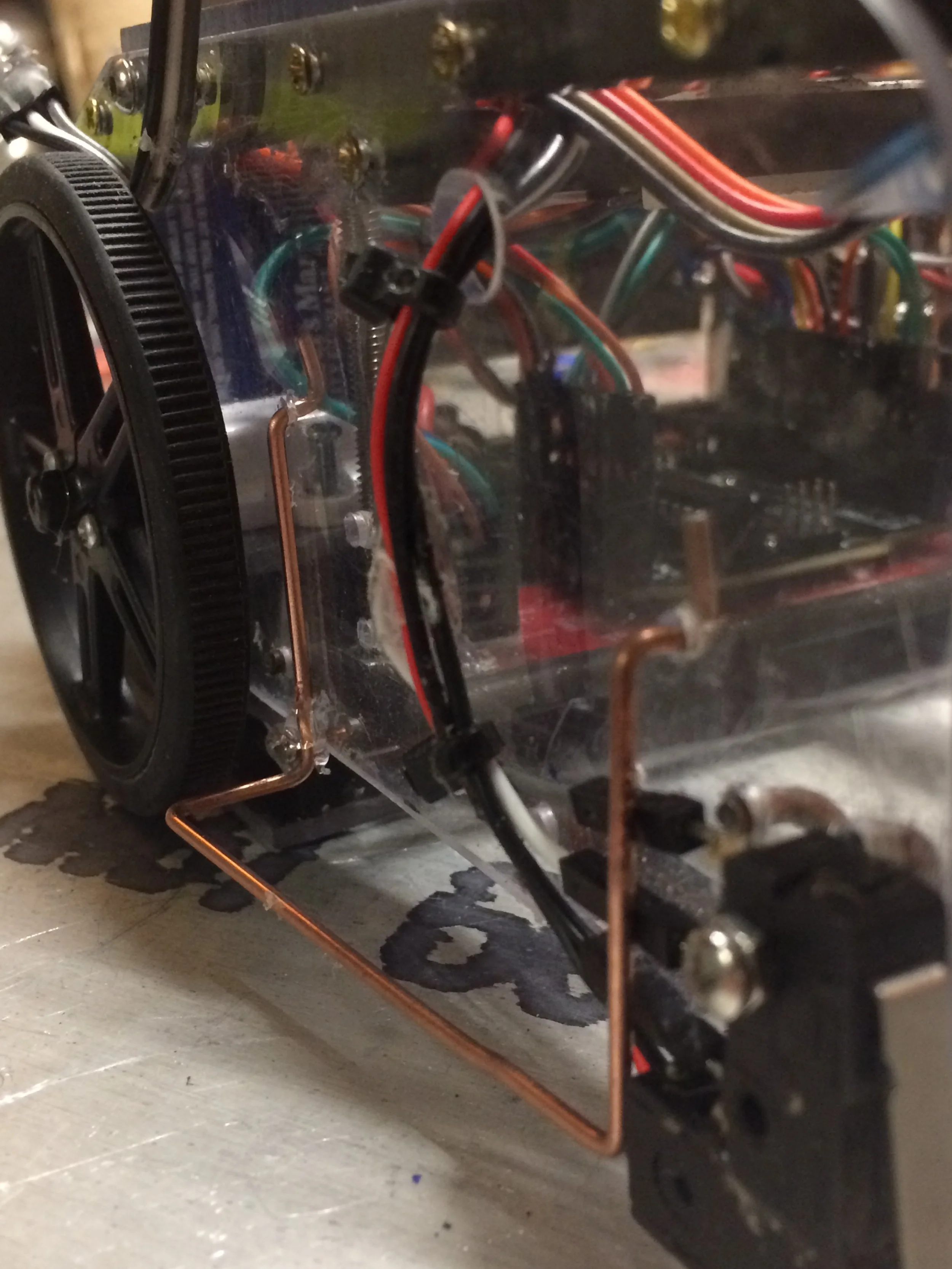
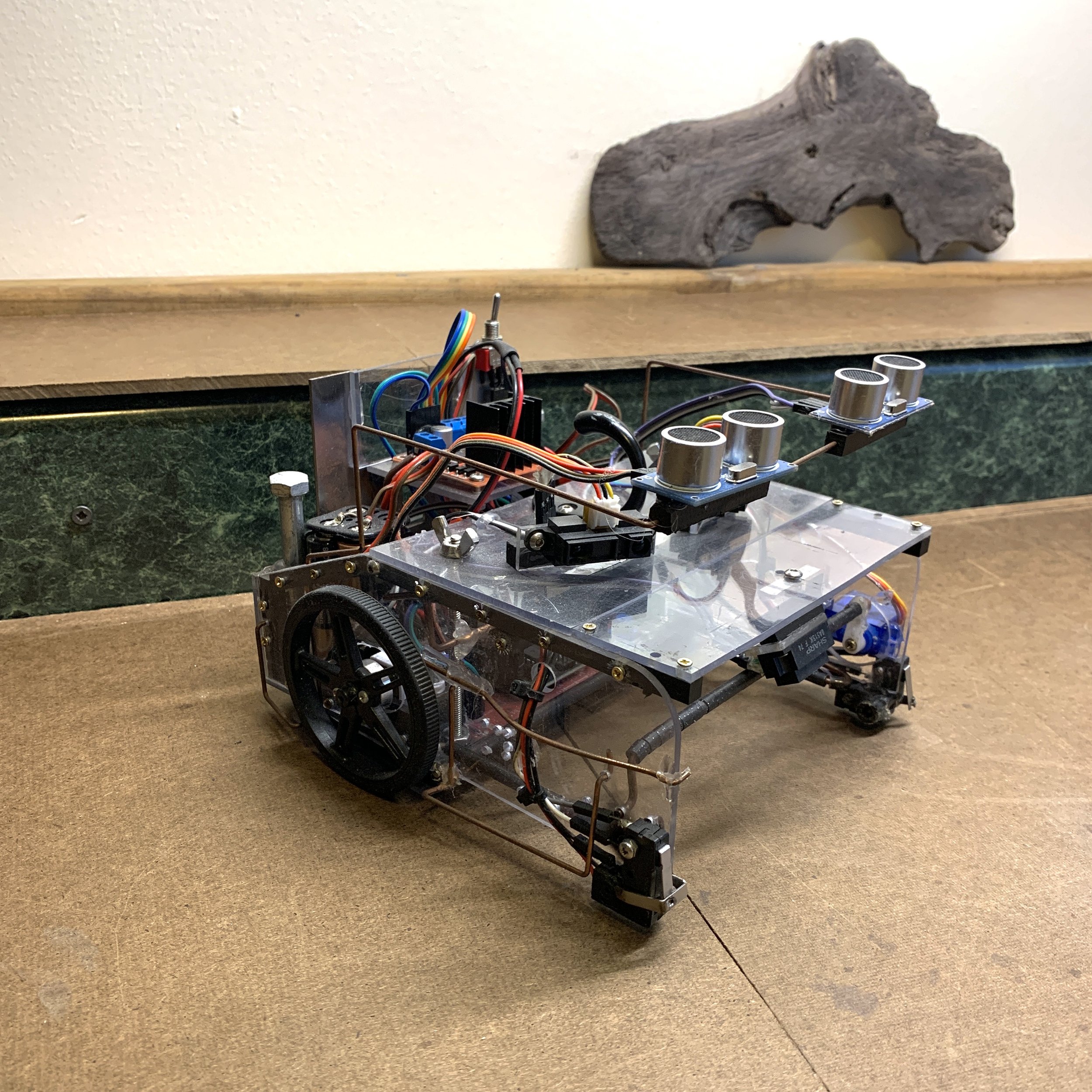
Mechanical Design
Polycarbonate was used for the chassis of the robot in conjunction with an ABS skeleton, which provided a way to attach the polycarbonate panels to each other. The rear of the robot was weighted preventing the need for wheels at the front of the robot.

End Result
The robot won 1st place in the robot socky competition, completing 8 rounds without any mechanical, electrical, or software failures.


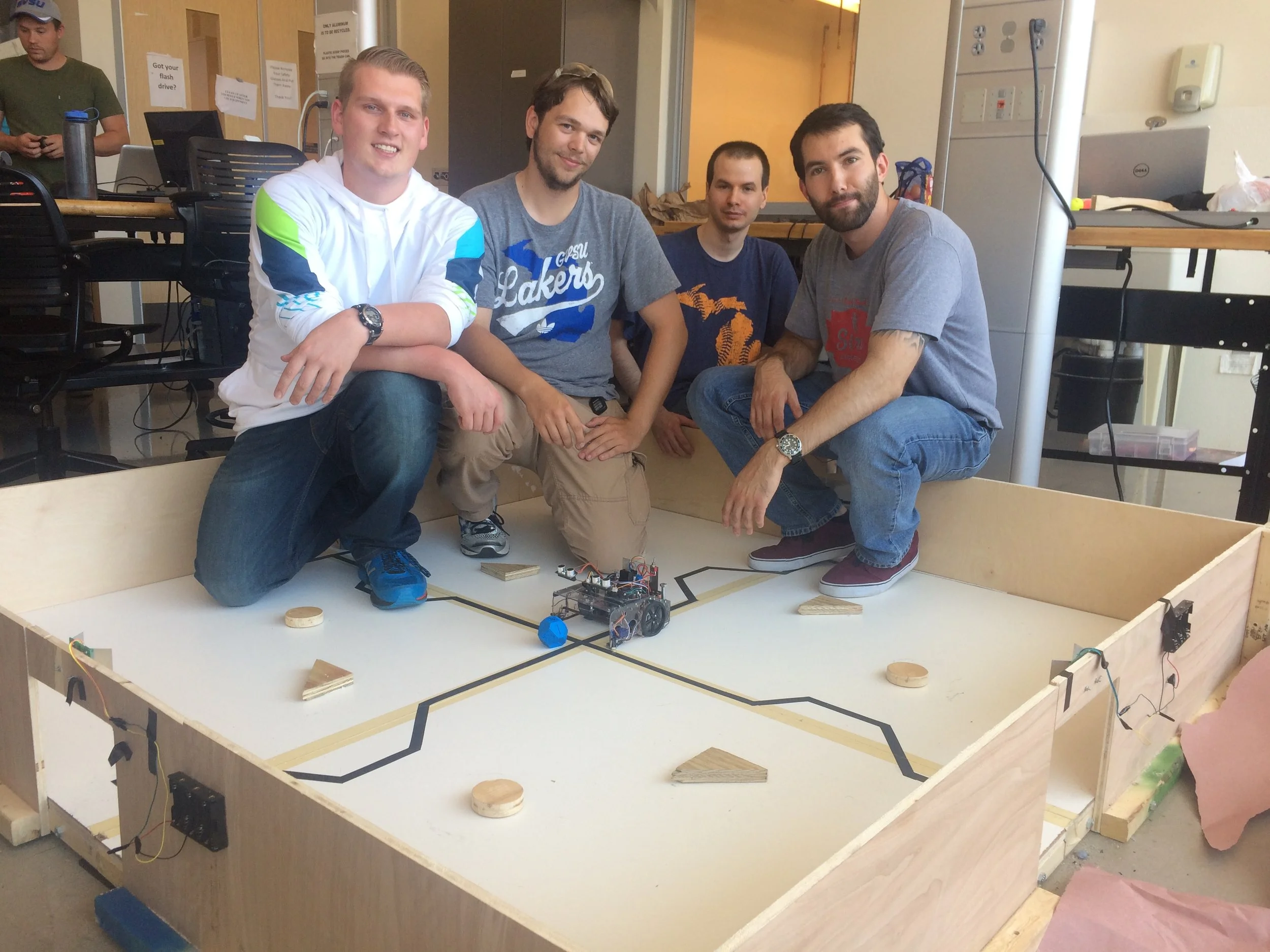
Team / Awards
Our team won a decisive victory against the other engineering teams who competed in the robot socky competition. It was later entered into the IEEE International Student Robotics Competition, where it won another 1st Place Prize.





Videos
Competition (Round 2)

Robot 2 Testing
Robot 1 Ball Catch Demo
Robot 1 Line Follow Demo
Robot 1 Object Avoidance Demo